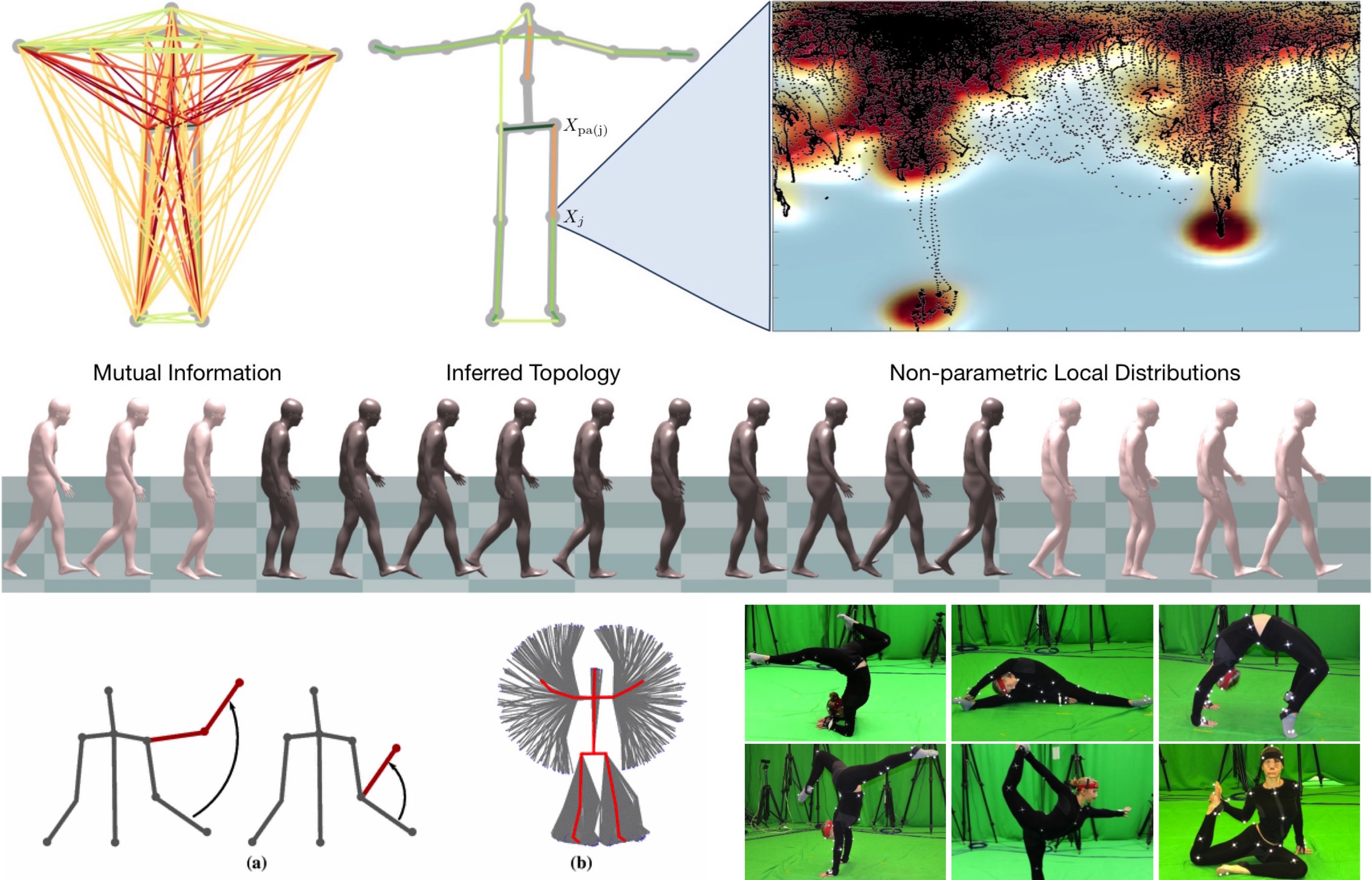
Top row: Representation of a human pose as a Bayesian network with optimal tree-structured topology and non-parametric local distributions [ ]. Middle row: Markov model from [ ] interpolates human pose realsitically. Bottom row: (left) Distance metric based on a manifold in joint space [ ]. (right) New motion capture dataset of extreme poses [ ].
A prior over human pose is important for many human tracking and pose estimation problems.
We introduce a sparse Bayesian network model of human pose that is non-parametric with respect to the estimation of both its graph structure and its local distributions [ ]. Using an efficient sampling scheme, we tractably compute exact log-likelihoods. The model is compositional, representing poses not present in the training set. It remains useful for real-time inference despite being non-parametric.
Action recognition and pose estimation are closely related topics; information from one task can be leveraged to assist the other, yet the two are often treated separately. In [ ] we develop a framework for coupled action recognition and pose estimation by formulating pose estimation as an optimization over a set of action-specific manifolds. The framework allows for integration of a 2D appearance-based action recognition system as a prior for 3D pose estimation and for refinement of the action labels using relational pose features based on the extracted 3D poses.
Modeling distributions over human poses requires a distance measure between human poses; this is often taken to be the Euclidean distance between joint angle vectors. In [ ] we present an algorithm for computing geodesics in the Riemannian space of joint positions, as well as a fast approximation that allows for large-scale analysis. Articulated tracking systems can be improved by replacing the standard distance with the geodesic distance in the space of joint positions. This measure significantly outperforms the traditional measure in classification, clustering and dimensionality reduction tasks.
To better model human pose we collected a new motion capture dataset of extreme poses [ ] that is available to the public.