Efficient Non-linear Markov Models for Human Motion
2014
Conference Paper
ps
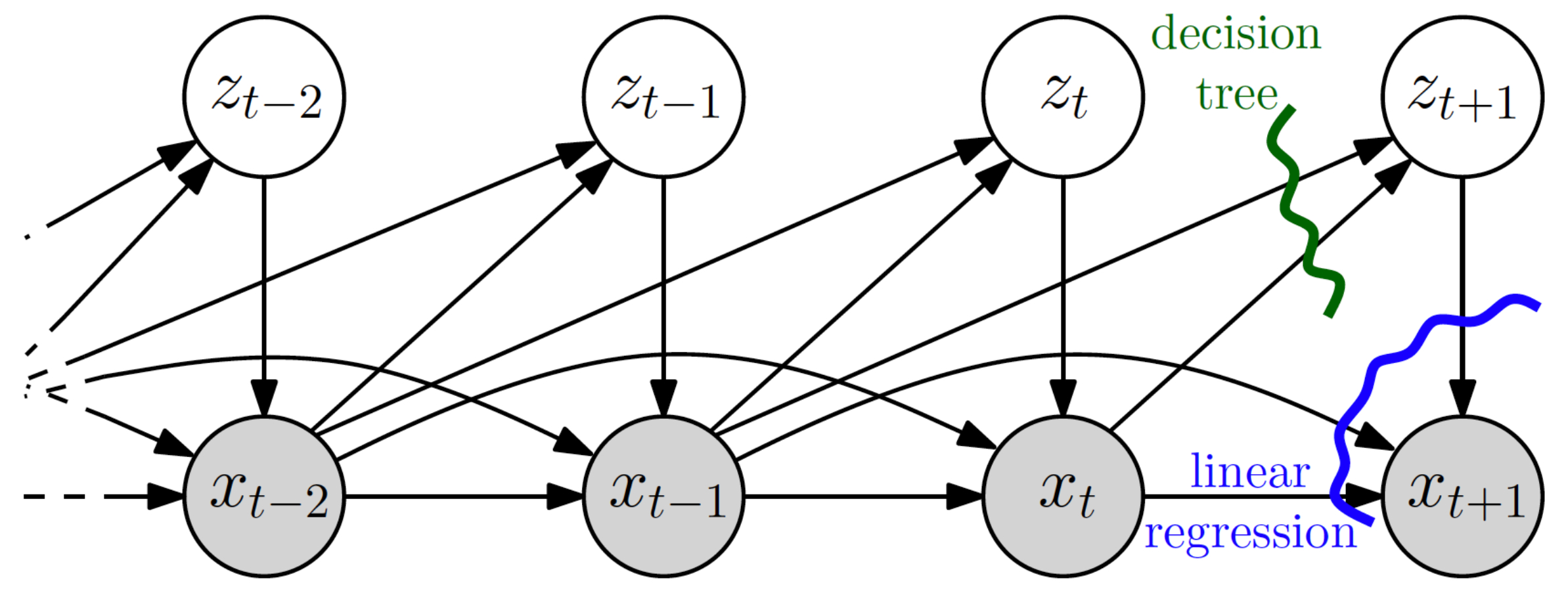
Dynamic Bayesian networks such as Hidden Markov Models (HMMs) are successfully used as probabilistic models for human motion. The use of hidden variables makes them expressive models, but inference is only approximate and requires procedures such as particle filters or Markov chain Monte Carlo methods. In this work we propose to instead use simple Markov models that only model observed quantities. We retain a highly expressive dynamic model by using interactions that are nonlinear and non-parametric. A presentation of our approach in terms of latent variables shows logarithmic growth for the computation of exact loglikelihoods in the number of latent states. We validate our model on human motion capture data and demonstrate state-of-the-art performance on action recognition and motion completion tasks.
| Author(s): | Andreas M. Lehrmann and Peter V. Gehler and Sebastian Nowozin |
| Book Title: | Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR) |
| Pages: | 1314-1321 |
| Year: | 2014 |
| Month: | June |
| Publisher: | IEEE |
| Department(s): | Perceiving Systems |
| Research Project(s): |
Pose and Motion Priors
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/CVPR.2014.171 |
| Event Name: | IEEE International Conference on Computer Vision and Pattern Recognition |
| Event Place: | Columbus, Ohio, USA |
| Attachments: |
pdf
|
|
BibTex @inproceedings{lehrmann14motion,
title = {Efficient Non-linear Markov Models for Human Motion},
author = {Lehrmann, Andreas M. and Gehler, Peter V. and Nowozin, Sebastian},
booktitle = { Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)},
pages = {1314-1321},
publisher = {IEEE},
month = jun,
year = {2014},
doi = {10.1109/CVPR.2014.171},
month_numeric = {6}
}
|
|