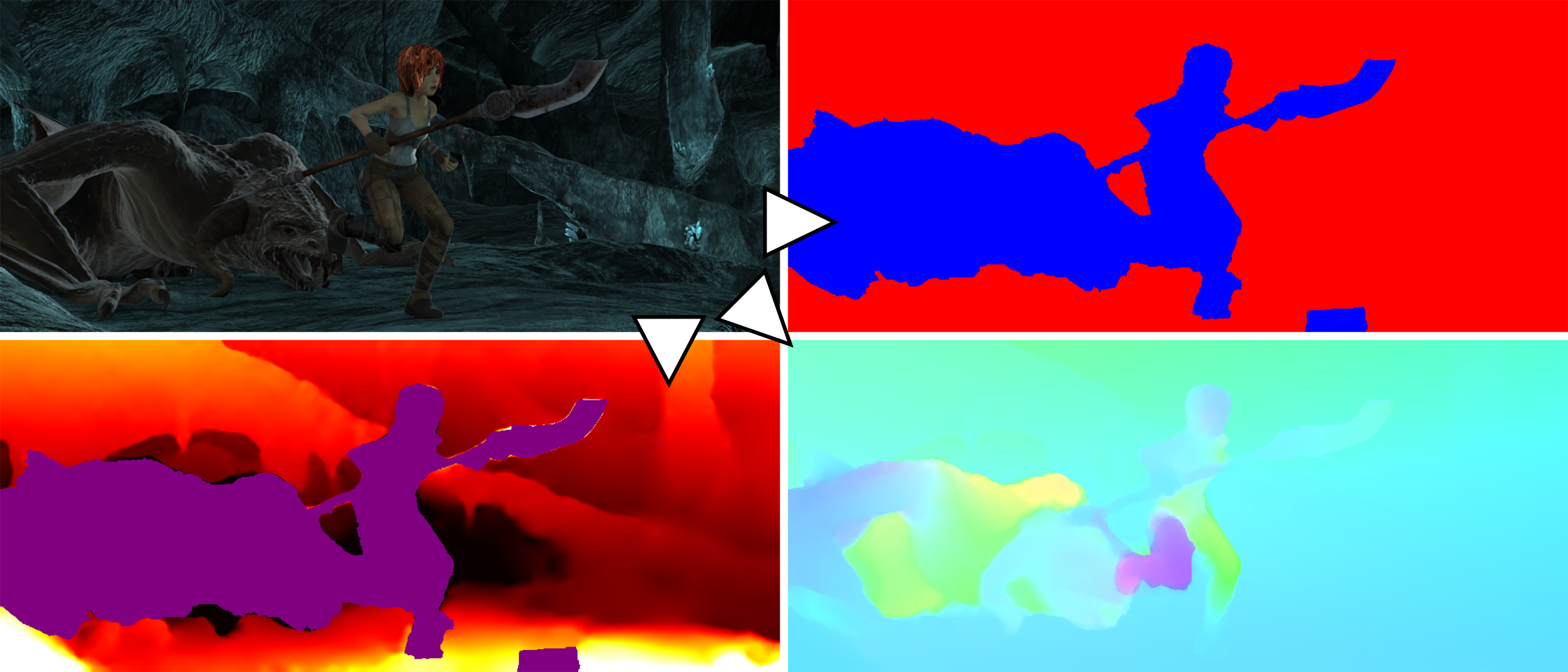
From a triplet of frames (top left), our method generates a segmentation into the static scene and moving objects (top right), an estimation of the depth structure (bottom left), and accurate optical flow (bottom right).
The optical flow of natural scenes is a combination of the motion of the observer and the independent motion of objects. Existing algorithms typically focus on either recovering motion and structure under the assumption of a purely static world or optical flow for general unconstrained scenes. We combine these approaches in an optical flow algorithm that estimates an explicit segmentation of moving objects from appearance and physical constraints. In static regions we take advantage of strong constraints to jointly estimate the camera motion and the 3D structure of the scene over multiple frames. This allows us to also regularize the structure instead of the motion. Our formulation uses a Plane+Parallax framework, which works even under small baselines, and reduces the motion estimation to a one-dimensional search problem, resulting in more accurate estimation. In moving regions the flow is treated as unconstrained, and computed with an existing optical flow method. The resulting Mostly-Rigid Flow (MR-Flow) method achieves state-of-the-art results on both the MPI-Sintel and KITTI-2015 benchmarks.
Trained CNNs (see included README.txt for usage details)