Deep Neural Network-based Cooperative Visual Tracking through Multiple Micro Aerial Vehicles
2018
Article
ps
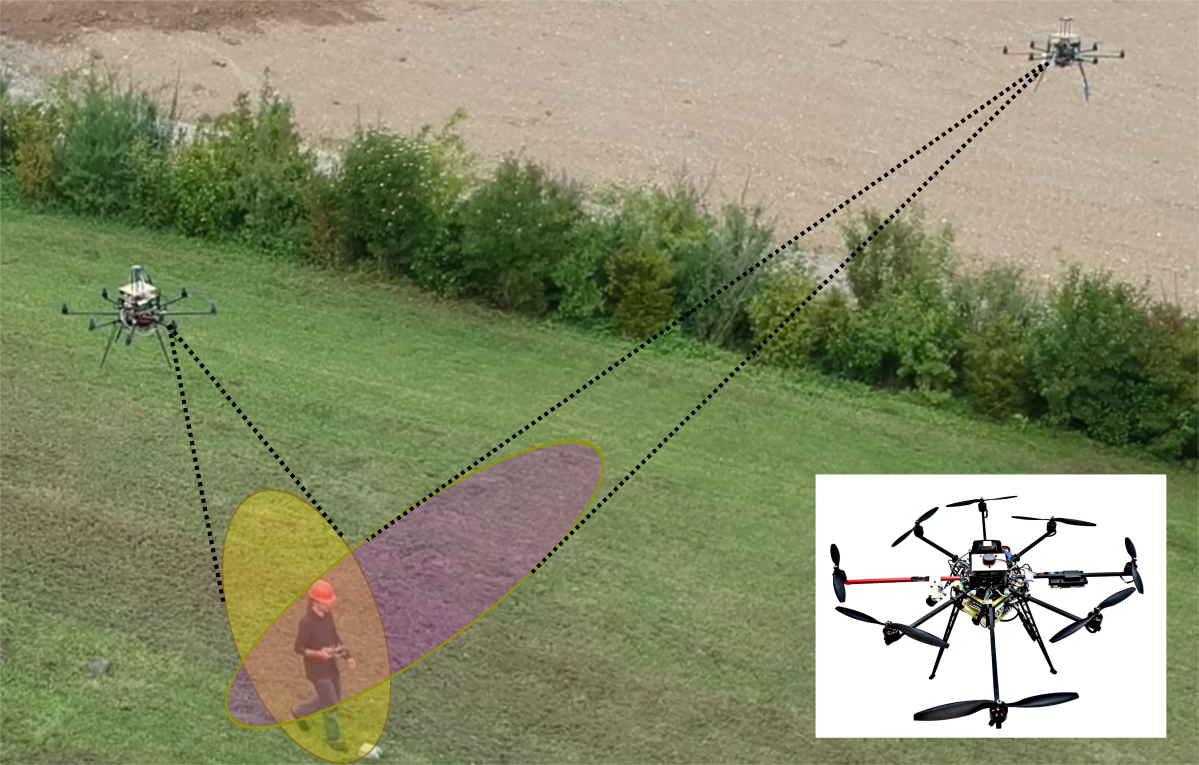
Multi-camera tracking of humans and animals in outdoor environments is a relevant and challenging problem. Our approach to it involves a team of cooperating micro aerial vehicles (MAVs) with on-board cameras only. DNNs often fail at objects with small scale or far away from the camera, which are typical characteristics of a scenario with aerial robots. Thus, the core problem addressed in this paper is how to achieve on-board, online, continuous and accurate vision-based detections using DNNs for visual person tracking through MAVs. Our solution leverages cooperation among multiple MAVs and active selection of most informative regions of image. We demonstrate the efficiency of our approach through simulations with up to 16 robots and real robot experiments involving two aerial robots tracking a person, while maintaining an active perception-driven formation. ROS-based source code is provided for the benefit of the community.
| Author(s): | Eric Price and Guilherme Lawless and Roman Ludwig and Igor Martinovic and Heinrich H. Buelthoff and Michael J. Black and Aamir Ahmad |
| Book Title: | Robotics and Automation Letters |
| Journal: | IEEE Robotics and Automation Letters |
| Volume: | 3 |
| Number (issue): | 4 |
| Pages: | 3193--3200 |
| Year: | 2018 |
| Month: | October |
| Publisher: | IEEE |
| Department(s): | Perceiving Systems |
| Research Project(s): | |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1109/LRA.2018.2850224 |
| Note: | Also accepted and presented in the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/8394622/ |
| Attachments: |
Published Version
|
|
BibTex @article{Price:RAL:2018,
title = {Deep Neural Network-based Cooperative Visual Tracking through Multiple Micro Aerial Vehicles},
author = {Price, Eric and Lawless, Guilherme and Ludwig, Roman and Martinovic, Igor and Buelthoff, Heinrich H. and Black, Michael J. and Ahmad, Aamir},
journal = {IEEE Robotics and Automation Letters},
booktitle = {Robotics and Automation Letters},
volume = {3},
number = {4},
pages = {3193--3200},
publisher = {IEEE},
month = oct,
year = {2018},
note = {Also accepted and presented in the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).},
doi = {10.1109/LRA.2018.2850224},
url = {https://ieeexplore.ieee.org/document/8394622/},
month_numeric = {10}
}
|
|