Decentralized MPC based Obstacle Avoidance for Multi-Robot Target Tracking Scenarios
2018
Conference Paper
ps
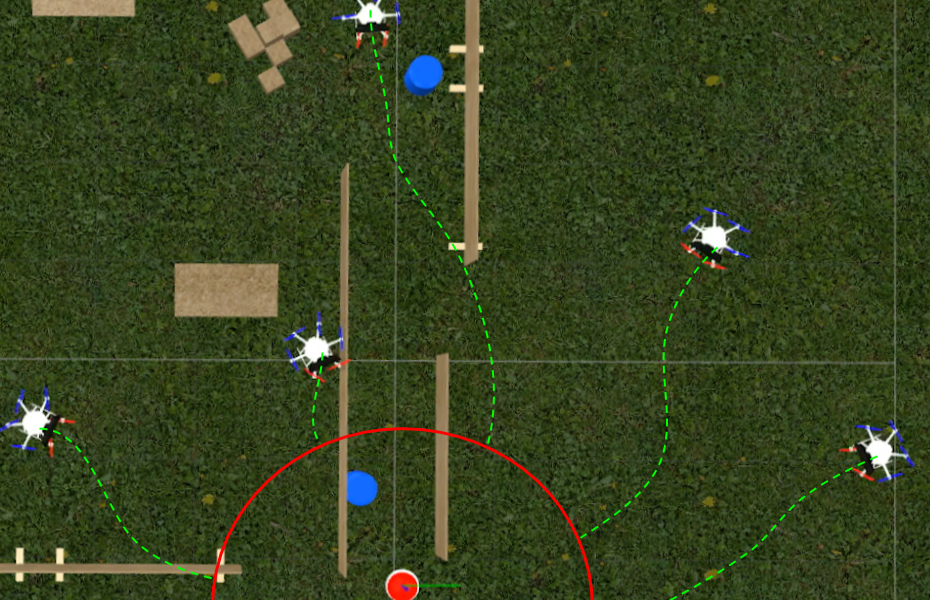
In this work, we consider the problem of decentralized multi-robot target tracking and obstacle avoidance in dynamic environments. Each robot executes a local motion planning algorithm which is based on model predictive control (MPC). The planner is designed as a quadratic program, subject to constraints on robot dynamics and obstacle avoidance. Repulsive potential field functions are employed to avoid obstacles. The novelty of our approach lies in embedding these non-linear potential field functions as constraints within a convex optimization framework. Our method convexifies nonconvex constraints and dependencies, by replacing them as pre-computed external input forces in robot dynamics. The proposed algorithm additionally incorporates different methods to avoid field local minima problems associated with using potential field functions in planning. The motion planner does not enforce predefined trajectories or any formation geometry on the robots and is a comprehensive solution for cooperative obstacle avoidance in the context of multi-robot target tracking. We perform simulation studies for different scenarios to showcase the convergence and efficacy of the proposed algorithm.
| Author(s): | Rahul Tallamraju and Sujit Rajappa and Michael J. Black and Kamalakar Karlapalem and Aamir Ahmad |
| Book Title: | 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) |
| Pages: | 1-8 |
| Year: | 2018 |
| Month: | August |
| Publisher: | IEEE |
| Department(s): | Perceiving Systems |
| Research Project(s): | |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| DOI: | 10.1109/SSRR.2018.8468655 |
| Event Place: | Philadelphia, PA, USA |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/8468655 |
| Attachments: |
Published Version
|
|
BibTex @conference{decMPC18,
title = {Decentralized {MPC} based Obstacle Avoidance for Multi-Robot Target Tracking Scenarios},
author = {Tallamraju, Rahul and Rajappa, Sujit and Black, Michael J. and Karlapalem, Kamalakar and Ahmad, Aamir},
booktitle = {2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR)},
pages = {1-8},
publisher = {IEEE},
month = aug,
year = {2018},
doi = {10.1109/SSRR.2018.8468655},
url = {https://ieeexplore.ieee.org/document/8468655},
month_numeric = {8}
}
|
|