Efficient Learning on Point Clouds with Basis Point Sets
2019-12-23
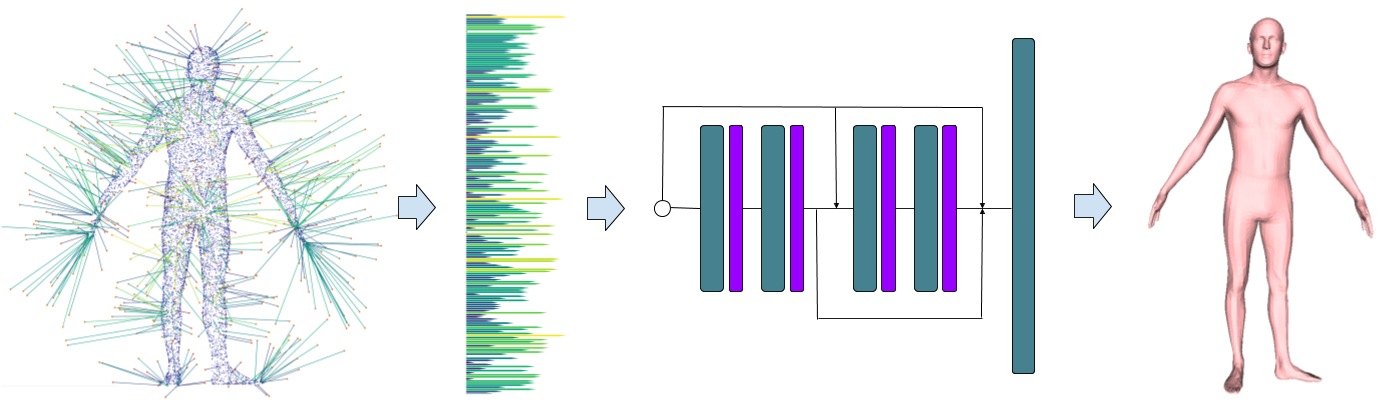
Basis Point Set (BPS) is a simple and efficient method for encoding 3D point clouds into fixed-length representations. It is based on a simple idea: select k fixed points in space and compute vectors from these basis points to the nearest points in a point cloud; use these vectors (or simply their norms) as features. The basis points are kept fixed for all the point clouds in the dataset, providing a fixed representation of every point cloud as a vector. This representation can then be used as input to arbitrary machine learning methods, in particular it can be used as input to off-the-shelf neural networks.
Basis Point Set (BPS) is a simple and efficient method for encoding 3D point clouds into fixed-length representations.
It is based on a simple idea: select k fixed points in space and compute vectors from these basis points to the nearest points in a point cloud; use these vectors (or simply their norms) as features. The basis points are kept fixed for all the point clouds in the dataset, providing a fixed representation of every point cloud as a vector.
This representation can then be used as input to arbitrary machine learning methods, in particular it can be used as input to off-the-shelf neural networks.
Below are the key differences between standard occupancy voxels, TSDF and the proposed BPS representation:
- continuous global vectors instead of simple binary flags or local distances in the cells;
- smaller number of cells required to represent shape accurately;
- BPS cell arrangement could be different from a standard rectangular grid, allowing different types of convolutions;
- significant improvement in performance: simply substituting occupancy voxels with BPS directional vectors results in a +9% accuracy improvement of a VoxNet-like 3D-convolutional network on a ModelNet40 classification challenge.
Check our ICCV 2019 paper and corresponding GitHub repository for more details.
| Author(s): | Sergey Prokudin, Christoph Lassner, Javier Romero |
| Department(s): |
Perceiving Systems |
| Publication(s): |
Efficient Learning on Point Clouds With Basis Point Sets
|
| Authors: | Sergey Prokudin, Christoph Lassner, Javier Romero |
| Maintainers: | Sergey Prokudin |
| Release Date: | 2019-12-23 |
| License: | The MIT License (MIT) |
| Copyright: | Amazon.com, Inc. |
| External Link: | https://github.com/sergeyprokudin/bps |